WorldView Stereopair Selection: SpaceNet UCSD Example#
This notebook documents the stereo-pair selection analysis used to choose three candidate pairs from the IARPA CORE3D / SpaceNet UCSD dataset for the companion processing notebook worldview_spacenet_ucsd_stereo.ipynb.
The goal is to rigorously scan all 35 WV3 scenes available for UCSD, compute pair geometry with asp_plot.stereopair_metadata_parser, and select three pairs with stable imaging geometry for the mixed campus-and-coastal-hills terrain at UCSD.
Background: stable imaging geometry#
Jeong, J. & Kim, T. (2016), Comparison of positioning accuracy of a rigorous sensor model and two rational function models for weak stereo geometry, ISPRS Journal of Photogrammetry and Remote Sensing 82(8): 625–633 — https://www.sciencedirect.com/science/article/abs/pii/S0099111216301021:
Stable imaging geometry, in addition to a precise sensor model, is also necessary to achieve detailed mapping. The stability of the imaging geometry can be expressed by the values of three angles: the convergence, bisector elevation (BIE), and asymmetry angles. The convergence angle reflects the base-to-height ratio; the BIE angle describes the obliqueness of the epipolar plane; the asymmetry angle specifies the level of symmetry between the left and right observation rays. In the ideal imaging geometry, the epipolar plane would be orthogonal (90° BIE angle) and symmetric (0° asymmetry angle) to the ground plane, to avoid accuracy degradation.
So the ideal is BIE → 90° and asymmetry → 0°. In this notebook these two angles are treated as secondary tiebreakers: they only move a pair up or down the ranking when they are notably far from ideal (BIE ≲ 70°, asymm ≳ 12°).
Convergence target for this scene#
Purely urban stereo analyses cite ~5–15° as the ideal convergence range — see Aguilar, M.Á. et al. (2019), 3D modelling of urban structures from very high resolution satellite imagery: a comparative analysis of convergence angle effect, European Journal of Remote Sensing, 52(sup1): 1–13 — https://www.tandfonline.com/doi/full/10.1080/22797254.2018.1551069#abstract. Small convergence reduces occlusion and matching failures on tall, steep-sided building facades.
But UCSD is a mixed landscape — campus and residential blocks plus deep coastal valleys, cliffs, and hills toward Mount Soledad / Torrey Pines. Pure low-convergence pairs under-constrain height recovery over the natural, lower-slope portions. Rules of thumb used in this notebook:
Urban-only scenes: ~5–15° is ideal (minimizes building occlusion).
Natural / low-slope terrain: higher convergence (≳ 25°) is beneficial — the larger base-to-height ratio improves vertical precision where occlusion is not the limiting factor.
Mixed urban + natural scenes (UCSD): ~15–25° is a practical middle ground.
Scoring priority#
Priority |
Criterion |
Direction |
|---|---|---|
Primary |
Convergence angle |
Target 15–25° |
Primary |
ROI overlap (% + containment of the processing ROI) |
Larger, full containment required |
Primary |
Temporal separation |Δt| (days) |
Smaller |
Primary |
Solar geometry similarity (|Δsun_el|, |Δsun_az|, UTC hour delta) |
Smaller |
Primary |
Off-nadir angle per scene |
Smaller (finer GSD, less oblique) |
Primary |
Sensor consistency |
Prefer WV3 + WV3 |
Secondary |
BIE angle |
Tiebreaker; penalize only if ≲ 70° |
Secondary |
Asymmetry angle |
Tiebreaker; penalize only if ≳ 12° |
Setup#
This notebook only downloads the small *.tar metadata archives (~2 MB each) — not the ~800 MB *.NTF images — because all we need to assess pair geometry is the XML camera metadata. Files go to /tmp/ucsd_scene_selection/ and are cleaned up at the end.
import os
import shutil
import subprocess
import tempfile
from itertools import combinations
from pathlib import Path
import contextily as ctx
import geopandas as gpd
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
from shapely.geometry import box
from asp_plot.stereopair_metadata_parser import StereopairMetadataParser
from asp_plot.utils import get_xml_tag
WORK_DIR = Path("/tmp/ucsd_scene_selection")
TAR_DIR = WORK_DIR / "tars"
XML_DIR = WORK_DIR / "xmls"
FLAT_DIR = WORK_DIR / "flat_xmls"
for d in (WORK_DIR, TAR_DIR, XML_DIR, FLAT_DIR):
d.mkdir(parents=True, exist_ok=True)
S3_PREFIX = "s3://spacenet-dataset/Hosted-Datasets/CORE3D-Public-Data/Satellite-Images/UCSD/WV3/PAN/"
# Region of interest for processing — a 3 x 3 km window over the UCSD campus,
# Mount Soledad, and Torrey Pines. UTM Zone 11N (EPSG:32611): xmin ymin xmax ymax.
# All candidate pairs must fully cover this ROI.
T_PROJWIN = (476000, 3635600, 479000, 3638600)
UTM_EPSG = 32611
1. Discover all WV3 scenes on S3#
The SpaceNet CORE3D UCSD bucket contains 35 WV3 panchromatic scenes in WV3/PAN/. We list them with aws s3 ls --no-sign-request and capture the .tar filenames.
result = subprocess.run(
["aws", "s3", "ls", "--no-sign-request", S3_PREFIX],
capture_output=True, text=True, check=True,
)
tar_names = sorted(
line.split()[-1]
for line in result.stdout.strip().splitlines()
if line.endswith(".tar")
)
print(f"Found {len(tar_names)} tar archives on S3.")
print("First 3:")
for t in tar_names[:3]:
print(" ", t)
Found 35 tar archives on S3.
First 3:
01JAN16WV031300016JAN01185802-P1BS-500647760070_01_P001_________AAE_0AAAAABPABN0.tar
05JAN15WV031300015JAN05183041-P1BS-500647758090_01_P001_________AAE_0AAAAABPABS0.tar
06FEB15WV031300015FEB06184344-P1BS-500647761030_01_P001_________AAE_0AAAAABPABQ0.tar
2. Download metadata archives and extract XMLs#
Each .tar archive is ~2 MB. The .NTF imagery (~800 MB each) is not downloaded — pair assessment uses only the XML camera models.
for name in tar_names:
dst = TAR_DIR / name
if dst.exists() and dst.stat().st_size > 0:
continue
subprocess.run(
["aws", "s3", "--no-sign-request", "cp",
f"{S3_PREFIX}{name}", str(dst), "--only-show-errors"],
check=True,
)
print(f"Tars on disk: {len(list(TAR_DIR.glob('*.tar')))}")
# Extract each tar (idempotent — tar -x overwrites unchanged files)
for tar in TAR_DIR.glob("*.tar"):
subprocess.run(["tar", "xf", str(tar), "-C", str(XML_DIR)], check=True)
# The archives nest deeply; pull the *P1BS*.XML files out into a flat dir
for xml in XML_DIR.rglob("*P1BS*.XML"):
if "PAN" in str(xml):
shutil.copy(xml, FLAT_DIR / xml.name)
print(f"P1BS XMLs flattened: {len(list(FLAT_DIR.glob('*.XML')))}")
Tars on disk: 35
P1BS XMLs flattened: 35
3. Extract per-scene metadata#
We use StereopairMetadataParser.get_id_dict(catid, xml) to parse each XML into a dict with sensor, date, viewing geometry, solar geometry, GSD, footprint polygon, and ephemeris. The parser is instantiated with a throwaway 2-XML directory (just to satisfy __init__); we call get_id_dict manually for each of the 35 scenes — this is N-scene-safe and avoids the built-in dg_mosaic path the class takes when it sees > 2 XMLs in a single directory (intended for mosaicking tiles of one scene).
# Set up a dummy parser — get_id_dict() and pair_dict() only need `self` for
# helper methods (xml2poly, getEphem_gdf, etc.) and do not use self.image_list.
_dummy = tempfile.mkdtemp()
xmls_sorted = sorted(FLAT_DIR.glob("*.XML"))
for x in xmls_sorted[:2]:
shutil.copy(x, _dummy)
parser = StereopairMetadataParser(_dummy)
scene_dicts = []
rows = []
for x in xmls_sorted:
catid = get_xml_tag(str(x), "CATID")
d = parser.get_id_dict(catid, str(x), geteph=True)
scene_dicts.append(d)
rows.append({
"catid": d["catid"],
"sensor": d["sensor"],
"date": d["date"],
"off_nadir": d["meanoffnadirviewangle"],
"sat_az": d["meansataz"],
"sat_el": d["meansatel"],
"sun_az": d["meansunaz"],
"sun_el": d["meansunel"],
"gsd_m": d["meanproductgsd"],
"cloud": d["cloudcover"],
})
scene_df = pd.DataFrame(rows).sort_values("date").reset_index(drop=True)
print(f"{len(scene_df)} scenes parsed.")
scene_df
35 scenes parsed.
| catid | sensor | date | off_nadir | sat_az | sat_el | sun_az | sun_el | gsd_m | cloud | |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 104001000365CA00 | WV03 | 2014-10-27 18:25:10.483175 | 17.0 | 161.3 | 71.2 | 157.8 | 41.6 | 0.33 | 0.00 |
| 1 | 10400100039E7C00 | WV03 | 2014-10-28 18:40:08.733775 | 23.2 | 263.8 | 64.4 | 162.6 | 42.3 | 0.36 | 0.00 |
| 2 | 104001000496A100 | WV03 | 2014-11-09 18:29:48.722375 | 1.1 | 184.8 | 88.6 | 160.8 | 38.1 | 0.31 | 0.01 |
| 3 | 1040010004B41D00 | WV03 | 2014-11-22 18:34:28.860375 | 13.0 | 227.6 | 75.6 | 162.6 | 35.1 | 0.32 | 0.00 |
| 4 | 10400100047BBB00 | WV03 | 2014-11-28 18:29:01.304775 | 14.7 | 172.6 | 73.7 | 161.0 | 33.5 | 0.33 | 0.00 |
| 5 | 10400100057DD500 | WV03 | 2014-12-23 18:22:36.081975 | 24.1 | 132.4 | 63.3 | 157.2 | 30.3 | 0.36 | 0.00 |
| 6 | 1040010005843100 | WV03 | 2015-01-05 18:30:41.419775 | 8.2 | 146.0 | 80.8 | 157.4 | 31.2 | 0.31 | 0.00 |
| 7 | 10400100071D8800 | WV03 | 2015-01-24 18:35:47.652175 | 16.3 | 199.2 | 71.8 | 155.5 | 34.3 | 0.33 | 0.00 |
| 8 | 1040010007713300 | WV03 | 2015-02-06 18:43:44.791775 | 22.6 | 239.3 | 65.0 | 155.5 | 38.2 | 0.36 | 0.00 |
| 9 | 1040010007A3D100 | WV03 | 2015-02-11 18:23:49.684775 | 24.3 | 81.0 | 63.2 | 149.0 | 37.7 | 0.36 | 0.00 |
| 10 | 1040010007A93700 | WV03 | 2015-02-12 18:39:26.584775 | 8.4 | 268.3 | 80.8 | 153.3 | 39.6 | 0.32 | 0.00 |
| 11 | 1040010007CA4D00 | WV03 | 2015-02-24 18:31:34.272575 | 12.9 | 140.4 | 75.7 | 148.9 | 42.7 | 0.32 | 0.00 |
| 12 | 1040010009673900 | WV03 | 2015-03-21 18:29:22.415375 | 18.7 | 74.4 | 69.5 | 143.4 | 51.7 | 0.34 | 0.00 |
| 13 | 104001000A269C00 | WV03 | 2015-04-10 18:46:41.829375 | 23.4 | 233.6 | 64.0 | 145.7 | 61.3 | 0.36 | 0.00 |
| 14 | 104001000A3D7E00 | WV03 | 2015-04-28 18:31:36.260975 | 17.2 | 114.0 | 71.0 | 133.0 | 64.9 | 0.33 | 0.00 |
| 15 | 104001000B230500 | WV03 | 2015-04-29 18:47:09.198975 | 22.3 | 232.4 | 65.3 | 140.0 | 67.4 | 0.35 | 0.00 |
| 16 | 104001000FCC8E00 | WV03 | 2015-07-26 18:37:42.672575 | 24.4 | 40.3 | 63.2 | 122.7 | 68.1 | 0.36 | 0.01 |
| 17 | 104001000FBADE00 | WV03 | 2015-07-27 18:54:00.322775 | 23.7 | 246.4 | 63.7 | 130.8 | 70.7 | 0.36 | 0.00 |
| 18 | 104001000F0EB300 | WV03 | 2015-08-08 18:46:09.037575 | 21.7 | 197.5 | 65.8 | 133.0 | 67.3 | 0.35 | 0.00 |
| 19 | 104001000F2DF400 | WV03 | 2015-08-14 18:41:10.903575 | 11.7 | 51.3 | 77.3 | 133.9 | 65.3 | 0.32 | 0.00 |
| 20 | 1040010010339E00 | WV03 | 2015-08-27 18:48:56.191775 | 19.9 | 211.1 | 67.9 | 144.6 | 63.2 | 0.34 | 0.00 |
| 21 | 104001001159EA00 | WV03 | 2015-09-28 18:57:51.547575 | 23.6 | 262.8 | 64.0 | 162.2 | 53.8 | 0.36 | 0.00 |
| 22 | 10400100130B9B00 | WV03 | 2015-10-23 18:53:12.033775 | 21.7 | 221.9 | 66.0 | 166.1 | 44.8 | 0.35 | 0.00 |
| 23 | 1040010013426E00 | WV03 | 2015-11-17 18:48:02.317375 | 21.9 | 187.1 | 65.6 | 166.4 | 37.1 | 0.35 | 0.00 |
| 24 | 10400100140ED300 | WV03 | 2015-11-23 18:43:04.334775 | 19.2 | 152.1 | 68.7 | 164.9 | 35.5 | 0.34 | 0.00 |
| 25 | 10400100149C7200 | WV03 | 2015-11-29 18:37:32.745575 | 24.2 | 77.2 | 63.3 | 163.2 | 33.9 | 0.36 | 0.00 |
| 26 | 1040010014AF5E00 | WV03 | 2015-12-13 18:58:48.063975 | 22.6 | 247.3 | 65.0 | 167.8 | 33.2 | 0.36 | 0.00 |
| 27 | 10400100162B0400 | WV03 | 2015-12-18 18:38:06.476375 | 23.5 | 84.2 | 64.0 | 161.8 | 31.7 | 0.36 | 0.00 |
| 28 | 1040010016570500 | WV03 | 2015-12-25 18:49:02.014575 | 20.4 | 185.0 | 67.3 | 163.7 | 32.1 | 0.34 | 0.00 |
| 29 | 1040010016C57700 | WV03 | 2015-12-31 18:43:43.612175 | 18.4 | 144.9 | 69.6 | 161.5 | 31.9 | 0.34 | 0.00 |
| 30 | 1040010016091700 | WV03 | 2016-01-01 18:58:02.512575 | 24.2 | 328.7 | 63.5 | 165.1 | 32.8 | 0.36 | 0.00 |
| 31 | 10400100179C8D00 | WV03 | 2016-01-26 18:53:38.536575 | 21.9 | 204.9 | 65.7 | 160.0 | 36.1 | 0.35 | 0.00 |
| 32 | 1040010017A92D00 | WV03 | 2016-02-08 18:58:10.215175 | 21.7 | 230.3 | 65.9 | 159.4 | 39.9 | 0.35 | 0.00 |
| 33 | 1040010018921400 | WV03 | 2016-02-14 18:52:56.516575 | 21.8 | 197.9 | 65.8 | 157.0 | 41.3 | 0.35 | 0.00 |
| 34 | 10400100190C5100 | WV03 | 2016-02-20 18:47:27.440975 | 12.1 | 143.1 | 76.5 | 154.4 | 42.8 | 0.32 | 0.00 |
4. Enumerate all unique pairs and compute geometry metrics#
With 35 scenes we have $\binom{35}{2} = 595$ candidate pairs. For each pair we compute (via parser.pair_dict):
conv_ang— convergence angle (degrees)bh_ratio— base-to-height ratio (derived from convergence)bie_ang— bisector elevation angle (degrees; ideal 90°)asymm_ang— asymmetry angle (degrees; ideal 0°)inter_km2— intersection-footprint areainter_perc_min— minimum of (% of each scene that is intersected)
Plus manually-computed acquisition-condition deltas:
dt_days— temporal separation (calendar days)delta_sun_el,delta_sun_az— solar geometry differences (degrees; az uses circular distance)tod_hour_delta— time-of-day (UTC hour) delta — sun-shadow-direction proxyroi_contained— does the intersection polygon fully contain the 3 × 3 km processing ROI?
roi_utm_poly = box(*T_PROJWIN)
roi_latlon_poly = (
gpd.GeoDataFrame(geometry=[roi_utm_poly], crs=f"EPSG:{UTM_EPSG}")
.to_crs("EPSG:4326")
.geometry.iloc[0]
)
pair_rows = []
for d1, d2 in combinations(scene_dicts, 2):
if d1["date"] > d2["date"]:
d1, d2 = d2, d1
pairname = f"{d1['catid']}_{d2['catid']}"
p = parser.pair_dict(d1, d2, pairname)
dt_days = p["dt"].total_seconds() / 86400.0
delta_sun_el = abs(d1["meansunel"] - d2["meansunel"])
dsun_az = abs(d1["meansunaz"] - d2["meansunaz"])
delta_sun_az = min(dsun_az, 360 - dsun_az)
hour1 = d1["date"].hour + d1["date"].minute / 60.0
hour2 = d2["date"].hour + d2["date"].minute / 60.0
dh = abs(hour1 - hour2)
tod_hour_delta = min(dh, 24 - dh)
if p["intersection"] is not None:
roi_contained = p["intersection"].contains(roi_latlon_poly)
inter_area = p["intersection_area"]
inter_perc = min(p["intersection_area_perc"])
else:
roi_contained = False
inter_area = None
inter_perc = None
pair_rows.append({
"pairname": pairname,
"catid1": d1["catid"], "catid2": d2["catid"],
"sensor1": d1["sensor"], "sensor2": d2["sensor"],
"date1": d1["date"], "date2": d2["date"],
"dt_days": round(dt_days, 2),
"conv_ang": p["conv_ang"],
"bh_ratio": p["bh"],
"bie_ang": p["bie"],
"asymm_ang": p.get("asymmetry_angle"),
"inter_km2": inter_area,
"inter_perc_min": inter_perc,
"roi_contained": roi_contained,
"off_nadir1": d1["meanoffnadirviewangle"],
"off_nadir2": d2["meanoffnadirviewangle"],
"delta_sun_el": round(delta_sun_el, 2),
"delta_sun_az": round(delta_sun_az, 2),
"tod_hour_delta": round(tod_hour_delta, 2),
})
pair_df = pd.DataFrame(pair_rows)
print(f"Computed {len(pair_df)} pairs.")
print(f"Pairs fully containing the ROI: {pair_df.roi_contained.sum()}")
print(f"Pairs with convergence in 15–25°: {((pair_df.conv_ang >= 15) & (pair_df.conv_ang <= 25)).sum()}")
Computed 595 pairs.
Pairs fully containing the ROI: 595
Pairs with convergence in 15–25°: 163
5. Filter and score#
Filters#
The intersection polygon must fully contain the 3 × 3 km ROI (
roi_contained == True).Convergence must not be missing.
Scoring#
Smaller score → better. Weights reflect the priority table from the intro: convergence dominates, followed by solar geometry and temporal separation. BIE and asymmetry are applied as penalty flags that activate only when notably bad (BIE < 70° or asymm > 12°), so they don’t dominate a well-behaved pair’s ranking.
score = 3.0 · conv_penalty # 0 inside [15, 25°], else distance from that band
+ 0.15 · dt_days
+ 0.30 · |Δsun_el|
+ 0.10 · |Δsun_az|
+ 0.10 · mean(off_nadir1, off_nadir2)
+ 5.0 · (bie_ang < 70)
+ 5.0 · (asymm_ang > 12)
def conv_penalty(c):
if 15 <= c <= 25:
return 0.0
return float(min(abs(c - 15), abs(c - 25)))
scored = pair_df[pair_df.roi_contained & pair_df.conv_ang.notna()].copy()
scored["conv_penalty"] = scored["conv_ang"].apply(conv_penalty)
scored["bie_flag"] = (scored["bie_ang"] < 70).astype(int)
scored["asymm_flag"] = (scored["asymm_ang"] > 12).astype(int)
scored["score"] = (
3.0 * scored["conv_penalty"]
+ 0.15 * scored["dt_days"]
+ 0.30 * scored["delta_sun_el"]
+ 0.10 * scored["delta_sun_az"]
+ 0.10 * scored[["off_nadir1", "off_nadir2"]].mean(axis=1)
+ 5.0 * scored["bie_flag"]
+ 5.0 * scored["asymm_flag"]
)
scored = scored.sort_values("score").reset_index(drop=True)
print(f"Candidates after filtering: {len(scored)}")
display_cols = [
"pairname", "dt_days", "conv_ang", "bie_ang", "asymm_ang",
"inter_perc_min", "delta_sun_el", "delta_sun_az",
"tod_hour_delta", "off_nadir1", "off_nadir2", "score",
]
scored[display_cols].head(15)
Candidates after filtering: 595
| pairname | dt_days | conv_ang | bie_ang | asymm_ang | inter_perc_min | delta_sun_el | delta_sun_az | tod_hour_delta | off_nadir1 | off_nadir2 | score | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 1040010018921400_10400100190C5100 | 6.00 | 19.60 | 72.98 | 10.40 | 91.80 | 1.5 | 2.6 | 0.08 | 21.8 | 12.1 | 3.3050 |
| 1 | 104001000365CA00_104001000496A100 | 13.00 | 17.52 | 79.95 | 9.84 | 90.13 | 3.5 | 3.0 | 0.07 | 17.0 | 1.1 | 4.2050 |
| 2 | 1040010007A93700_1040010007CA4D00 | 11.99 | 21.21 | 84.31 | 2.73 | 94.82 | 3.1 | 4.4 | 0.13 | 8.4 | 12.9 | 4.2335 |
| 3 | 104001000496A100_10400100047BBB00 | 19.00 | 14.93 | 81.16 | 8.64 | 94.32 | 4.6 | 0.2 | 0.00 | 1.1 | 14.7 | 5.2500 |
| 4 | 1040010007A3D100_1040010007CA4D00 | 13.01 | 22.84 | 71.73 | 11.63 | 81.98 | 5.0 | 0.1 | 0.13 | 24.3 | 12.9 | 5.3215 |
| 5 | 1040010004B41D00_10400100047BBB00 | 6.00 | 14.14 | 76.31 | 2.08 | 97.25 | 1.6 | 1.6 | 0.08 | 13.0 | 14.7 | 5.5050 |
| 6 | 10400100071D8800_1040010007A93700 | 19.00 | 17.14 | 78.38 | 7.00 | 93.51 | 5.3 | 2.2 | 0.07 | 16.3 | 8.4 | 5.8950 |
| 7 | 1040010005843100_10400100071D8800 | 19.00 | 14.61 | 77.55 | 8.35 | 93.48 | 3.1 | 1.9 | 0.08 | 8.2 | 16.3 | 6.3650 |
| 8 | 1040010016C57700_10400100179C8D00 | 26.01 | 22.19 | 70.38 | 4.07 | 94.79 | 4.2 | 1.5 | 0.17 | 18.4 | 21.9 | 7.3265 |
| 9 | 104001000365CA00_1040010004B41D00 | 26.01 | 18.36 | 75.94 | 4.01 | 96.78 | 6.5 | 4.8 | 0.15 | 17.0 | 13.0 | 7.8315 |
| 10 | 10400100179C8D00_10400100190C5100 | 25.00 | 21.31 | 73.42 | 9.73 | 90.64 | 6.7 | 5.6 | 0.10 | 21.9 | 12.1 | 8.0200 |
| 11 | 1040010007713300_1040010007A93700 | 6.00 | 17.49 | 73.31 | 15.40 | 82.63 | 1.4 | 2.2 | 0.07 | 22.6 | 8.4 | 8.0900 |
| 12 | 104001000496A100_1040010004B41D00 | 13.00 | 13.41 | 82.27 | 7.53 | 92.06 | 3.0 | 1.8 | 0.08 | 1.1 | 13.0 | 8.5050 |
| 13 | 1040010007CA4D00_1040010009673900 | 25.00 | 19.47 | 75.19 | 5.76 | 90.43 | 9.0 | 5.5 | 0.03 | 12.9 | 18.7 | 8.5800 |
| 14 | 10400100057DD500_1040010005843100 | 13.01 | 17.88 | 72.14 | 17.48 | 80.20 | 0.9 | 0.2 | 0.13 | 24.1 | 8.2 | 8.8565 |
6. Visualize the ranked candidates#
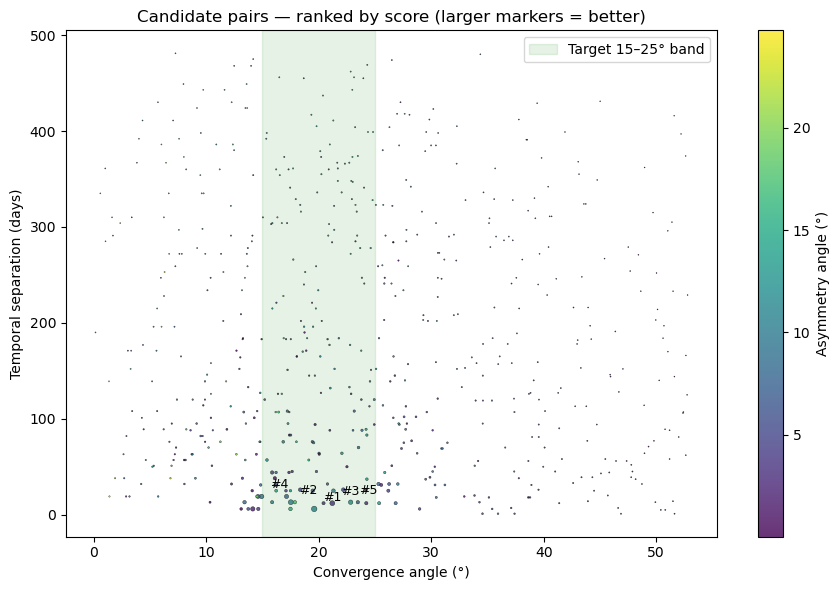
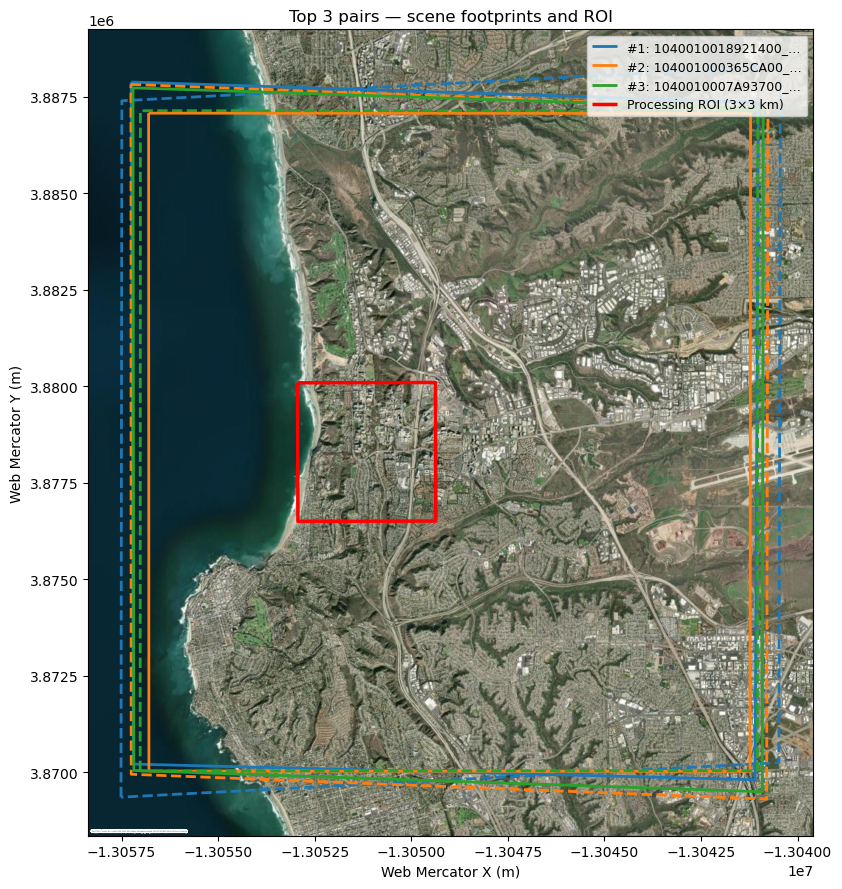
Two views:
Scatter — convergence angle vs. temporal separation, colored by asymmetry, sized by inverse score. The 15–25° target band is shaded.
Map — scene footprints for the top 3 pairs over an Esri WorldImagery basemap with the ROI highlighted.
fig, ax = plt.subplots(figsize=(9, 6))
sc = ax.scatter(
scored["conv_ang"], scored["dt_days"],
c=scored["asymm_ang"], cmap="viridis",
s=60 * np.clip(1 / (scored["score"] + 0.5), 0, 5),
alpha=0.8, edgecolor="k", linewidth=0.3,
)
cb = plt.colorbar(sc, ax=ax, label="Asymmetry angle (°)")
ax.axvspan(15, 25, color="green", alpha=0.10, label="Target 15–25° band")
for i in range(min(5, len(scored))):
row = scored.iloc[i]
ax.annotate(f"#{i+1}", (row["conv_ang"], row["dt_days"]),
textcoords="offset points", xytext=(6, 6), fontsize=9)
ax.set_xlabel("Convergence angle (°)")
ax.set_ylabel("Temporal separation (days)")
ax.set_title("Candidate pairs — ranked by score (larger markers = better)")
ax.legend(loc="upper right")
plt.tight_layout()
plt.show()
fig, ax = plt.subplots(figsize=(9, 9))
top3_idx = scored.index[:3]
colors = ["tab:blue", "tab:orange", "tab:green"]
for i, (idx, color) in enumerate(zip(top3_idx, colors)):
row = scored.loc[idx]
g1 = next(d["geom"] for d in scene_dicts if d["catid"] == row["catid1"])
g2 = next(d["geom"] for d in scene_dicts if d["catid"] == row["catid2"])
for g, style in [(g1, "--"), (g2, "-")]:
gdf = gpd.GeoDataFrame(geometry=[g], crs="EPSG:4326").to_crs(3857)
gdf.boundary.plot(ax=ax, color=color, linestyle=style, linewidth=2,
label=f"#{i+1}: {row['pairname'][:17]}…" if style == "-" else None)
roi_gdf = gpd.GeoDataFrame(geometry=[roi_utm_poly], crs=f"EPSG:{UTM_EPSG}").to_crs(3857)
roi_gdf.boundary.plot(ax=ax, color="red", linewidth=2.5, label="Processing ROI (3×3 km)")
ctx.add_basemap(ax, crs=3857, source=ctx.providers.Esri.WorldImagery, attribution_size=0)
ax.set_title("Top 3 pairs — scene footprints and ROI")
ax.legend(loc="upper right", fontsize=9)
ax.set_xlabel("Web Mercator X (m)")
ax.set_ylabel("Web Mercator Y (m)")
plt.tight_layout()
plt.show()
7. Selected pairs#
The three pairs carried forward into the processing notebooks were chosen from the ranked candidates to span the 15–25° convergence band while keeping temporal separation, solar geometry, and BIE/asymmetry all in good shape. They are all same-sensor (WV3 + WV3) and all fully contain the 3 × 3 km processing ROI.
Pair folder / notebook suffix |
catid1 × catid2 |
Conv (°) |
|Δt| (d) |
BIE (°) |
Asymm (°) |
Overlap % |
|Δsun_el| (°) |
|---|---|---|---|---|---|---|---|
|
|
14.14 |
6 |
76.3 |
2.1 |
97.3 |
1.6 |
|
|
17.52 |
13 |
80.0 |
9.8 |
90.1 |
3.5 |
|
|
21.21 |
12 |
84.3 |
2.7 |
94.8 |
3.1 |
The 18° pair has a noticeably asymmetric geometry (asymm 9.8°, just under the 12° flag threshold) — it’s retained because its convergence sits at the middle of the urban-ideal band and gives us a useful mid-convergence comparison, but we’ll note when reviewing its DEM whether the asymmetry shows up in the residuals.
Processing notebooks (same cropped ROI, same reference DEM, same pipeline):
worldview_spacenet_ucsd_stereo_14deg_6d.ipynbworldview_spacenet_ucsd_stereo_18deg_13d.ipynbworldview_spacenet_ucsd_stereo_21deg_12d.ipynb
selected_pairs = [
("14deg_6d", "1040010004B41D00", "10400100047BBB00"),
("18deg_13d", "104001000365CA00", "104001000496A100"),
("21deg_12d", "1040010007A93700", "1040010007CA4D00"),
]
for tag, c1, c2 in selected_pairs:
row = scored[
scored.apply(lambda r: frozenset({r.catid1, r.catid2}) == frozenset({c1, c2}), axis=1)
].iloc[0]
print(f"{tag:10s} rank={scored.index.get_loc(row.name)+1:3d} "
f"conv={row.conv_ang:5.2f}° bie={row.bie_ang:5.2f}° asymm={row.asymm_ang:5.2f}° "
f"dt={row.dt_days:5.1f}d overlap={row.inter_perc_min:5.1f}% "
f"Δsun_el={row.delta_sun_el:4.1f}°")
14deg_6d rank= 6 conv=14.14° bie=76.31° asymm= 2.08° dt= 6.0d overlap= 97.2% Δsun_el= 1.6°
18deg_13d rank= 2 conv=17.52° bie=79.95° asymm= 9.84° dt= 13.0d overlap= 90.1% Δsun_el= 3.5°
21deg_12d rank= 3 conv=21.21° bie=84.31° asymm= 2.73° dt= 12.0d overlap= 94.8% Δsun_el= 3.1°
8. Processing outcomes: DEM-vs-ICESat-2 comparison#
We ran the full ASP stereo workflow on the three scene-selected candidate pairs from section 7.
For each resulting DEM we compared against ICESat-2 ATL06-SR ground-track points over the ROI. The table below summarizes pre- and post-pc_align height-residual statistics, compiled from a one-off offline run.
Stat columns:
n_icesat: ATL06-SR points retained after 3σ outlier filteringmedian_dh_pre_m/nmad_dh_pre_m: median and NMAD of ATL06-SR minus DEM beforepc_align(meters)translation_mag_m(|T|): magnitude of the 3D rigid translation applied bypc_alignmedian_dh_post_m/nmad_dh_post_m: same percentiles after alignment
pc_align only solves for a rigid translation, so it is the post-alignment NMAD that gives the cleanest read on intrinsic DEM quality: the median collapses toward zero by construction, and pre-alignment bias reflects absolute positioning rather than DEM geometry.
pair |
catid1 |
catid2 |
dt (d) |
conv (°) |
asymm (°) |
B/H |
n ICESat-2 |
median pre (m) |
NMAD pre (m) |
|T| (m) |
median post (m) |
NMAD post (m) |
selected |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
14deg_6d |
|
|
6 |
14.1 |
2.1 |
0.25 |
1053 |
2.05 |
2.01 |
1.99 |
0.09 |
1.97 |
|
18deg_13d |
|
|
13 |
17.5 |
9.8 |
0.31 |
1024 |
−1.23 |
1.77 |
1.42 |
−0.05 |
1.77 |
|
21deg_12d |
|
|
12 |
21.2 |
2.7 |
0.37 |
977 |
−7.53 |
1.63 |
8.00 |
0.05 |
1.53 |
yes |
Why 21deg_12d was selected#
Lowest post-alignment NMAD (1.53 m) of the three pairs — the DEM is the most internally consistent after a rigid shift is removed.
Convergence angle of 21.2° sits comfortably in the middle of the 15–25° band targeted in section 5.
Asymmetry of 2.7° means both scenes contribute comparable geometric weight to the stereo solution.
The 8.0 m translation magnitude is the largest of the three, but the NMAD improvement confirms this reflects a fixed absolute bias rather than internal DEM distortion;
pc_alignremoves it cleanly.
The canonical processing notebook worldview_spacenet_ucsd_stereo.ipynb uses this pair (1040010007A93700 × 1040010007CA4D00) and its companion PDF report is at WorldView_UCSD-asp-plot-report.pdf.
9. Clean up#
Remove all temporary tar/XML files. Only the XML metadata lives under /tmp/, so nothing outside the working directory is affected. Re-running this notebook will re-download the ~70 MB of tars from S3.
shutil.rmtree(WORK_DIR, ignore_errors=True)
print(f"Removed {WORK_DIR}: {not WORK_DIR.exists()}")
Removed /tmp/ucsd_scene_selection: True